新歓Cansat制作体験!!!
2024-04-09T09:52:57.879Z
回路作成
まずは回路を作りましょう!今回はブレッドボードを使用してモーターとモータードライバを接続する回路を作ります。
回路図
以下の図を参考に回路図を作成してみてください ↓↓↓
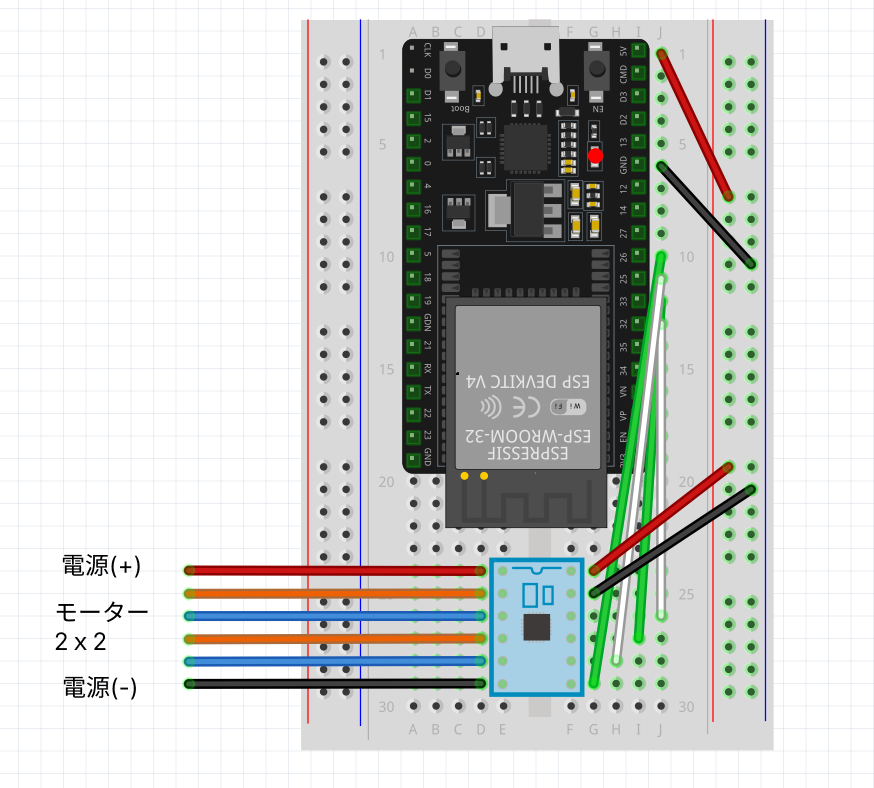
配線一覧
- モータードライバ ↔ESP32(マイコン)
- 5V (赤)
- GND (黒)
- GPIO x 4 (黄、オレンジ、緑、青)
- モータードライバ ↔DC モーター
- 2 x 2 本 (黃 x 2、オレンジ x 2)
- モータードライバ ↔ 電源
- + (赤)
- - (黒)
(バッテリーとモータはの線の先にはxhコネクタが接続されています。ここはxhコネクタにジャンパーワイヤを差し込んでください。)
基盤の機体取り付け
機体の上部にいい感じで取り付けてください。参考画像↓

スマホ取り付け
- 機体前方の留め具にスマホを取り付けてください。留め具が外れている等の問題があれば、留め具をつけ直してください。スマホはesp32の給電用なのでスマホがつきさえすれば止め方は何でも構いません。
- usbc↔microusbケーブルがcansat用の袋に入っているはずです。このケーブルでスマホとesp32を接続してesp32を給電してください。
プログラミング
ソースコード
Github リポジトリにアクセスしてソースコードを確認しましょう。